如何實現CAN節點的休眠

東西/原料
- CTM1044KAT休眠型隔離CAN模塊
- ZDS4054示波器
引腳界說
- 1
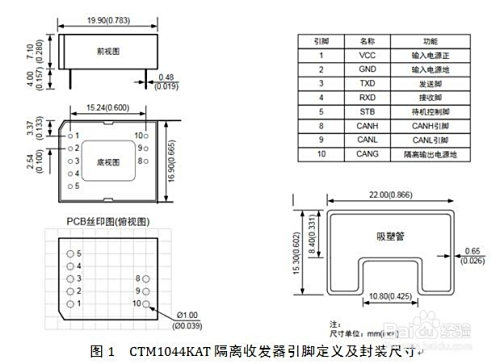
CTM1044KAT隔離收發器引腳界說及封裝尺寸如圖1所示。

 END
END
功能申明
- 1
正常模式
當STB引腳輸入高電日常平凡,模塊進入正常工作模式。在此模式下,模塊可以經由過程CAN總線發送和領受數據。模塊內部驅動器將TXD引腳的數字旌旗燈號轉換為CANH、CANL引腳的差分旌旗燈號。模塊內部領受器將CANH、CANL引腳的差分旌旗燈號轉換為RXD的數字旌旗燈號。
- 2
待機模式
當STB引腳輸入低電平或處于懸空狀況時,模塊進入低功耗待機模式。在此模式下,模塊無法經由過程TXD引腳將數據發送至CAN總線上,并且無法精確返回CAN總線上的信息。模塊RXD會始終連結高電平,直到模塊檢測到有用的總線叫醒旌旗燈號。模塊檢測到叫醒旌旗燈號叫醒后,RXD引腳返回總線上持續時候大于tWK_FT的顯性電平,直至從頭由正常模式切換至待機模式。在待機模式下,模塊的CANH、CANL引腳經由過程內部輸入電阻下拉到參考地CANG。檢測到叫醒旌旗燈號后,將STB引腳置高,產物從頭進入正常模式。
- 3
長途叫醒
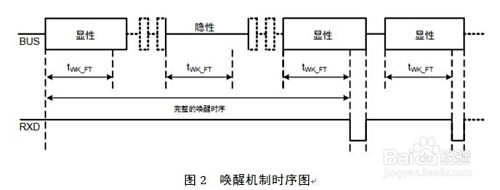
CTM1044KAT內部具有叫醒濾波器,目標是為了過濾總線異常、噪聲、浪涌等造當作的非真實叫醒旌旗燈號。當模塊檢測到總線上的有用叫醒旌旗燈號后,模塊才會叫醒并在RXD返回總線上的旌旗燈號。總線叫醒的顯性或隱性旌旗燈號持續時候必需大于tWK_FT,該旌旗燈號才會被識別。因為tWK_FT有必然的規模,對于分歧叫醒時序,可能會呈現以下幾種環境:
叫醒旌旗燈號持續時候小于tWK_FT(MIN),不會被識別;
叫醒旌旗燈號持續時候大于tWK_FT(MIN),小于tWK_FT(MAX),可能會被識別;
叫醒旌旗燈號持續時候大于tWK_FT(MAX),必然會被識別。
是以為了模塊被有用叫醒,一個完整的叫醒旌旗燈號應包含一個顯性電平,一個隱性電平,最后一個顯性電平竣事,三個電平持續時候均應大于tWK_FT(MAX),一旦模塊領受到叫醒旌旗燈號的第一個顯性電平,模塊將繼續期待領受第二個隱性電平,之后繼續期待領受第三個顯性電平,模塊期待時代呈現的不合適要求的旌旗燈號將會被過濾失落,待叫醒時序全數領受完當作后,模塊會將RXD引腳置低以領受總線上持續時候大于tWK_FT的顯性電平。CAN節制器檢測到模塊RXD引腳旌旗燈號后將被叫醒,此時可置STB引腳為高,產物將進入正常模式。具體如下圖2所示。
- 4
顯性超時
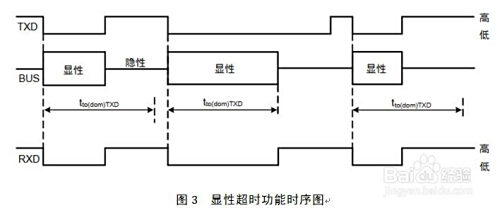
當TXD被置為低時,模塊內部的“顯性超時”按時器即會啟動。若是TXD引腳的低電平持續時候大于tto(dom)TXD,內部發送將被禁止,并釋放總線至隱性電平。這個功能是為了防止硬件或軟件錯誤導致總線持續連結顯性電平,避免總線癱瘓。當TXD引腳被置為高后,“顯性超時”按時重視置。如下圖3所示是顯性超時功能的時序圖。
 END
END
硬件設計典型毗連電路
- 1
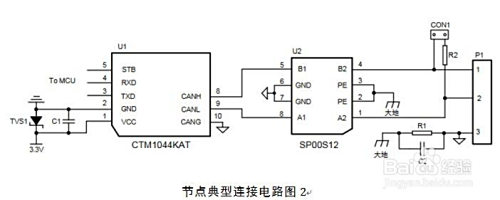
節點典型毗連電路圖
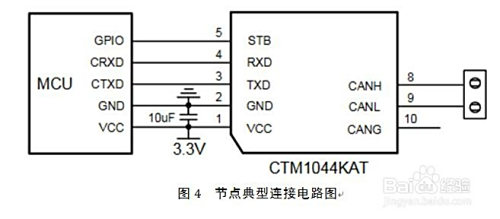
在利用情況優良的簡單應用中,如收發器測試、產物短距離通信測試等。模塊接上電源,端口和MCU及CAN收集總線毗連,無需外加器件便可直接利用,如下圖2所示。其他場所利用時,請參考下文的“保舉組網體例”進行組網接線。若總線利用情況惡劣,需戶外布線等,請參考下文的“端口庇護保舉電路”,恰當地增添外圍庇護器件,如下圖4所示。
- 2
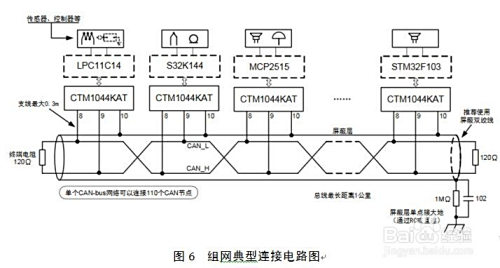
組網典型毗連電路圖
單個CAN總線收集保舉組網體例如下圖4所示,每個收集可接入110個CAN節點。利用CTM1044KAT系列產物時,最長通信距離為1km。若是需要接入更多節點或通信距離更長時,可經由過程CAN中繼器等設備進行擴展。
 END
END
注重事項
- CAN總線組網時,無論節點數幾多,距離遠近,工作速度凹凸,都需要在總線上加終端電阻
- CAN節制器邏輯電平需與CTM隔離CAN收發模塊相對應
- 組網時總線通信距離與通信速度以及現場應用相關,可按照現實應用和參考相關尺度設計,通信線纜選擇屏障雙絞線并盡量遠離干擾源。遠距離通信時,終端電阻值需要按照通信距離以及線纜阻抗和節點數目選擇合適值
- 發表于 2020-04-12 19:00
- 閱讀 ( 1575 )
- 分類:其他類型
0 篇文章
作家榜 ?
-
 xiaonan123
189 文章
xiaonan123
189 文章
-
 湯依妹兒
97 文章
湯依妹兒
97 文章
-
 luogf229
46 文章
luogf229
46 文章
-
 jy02406749
45 文章
jy02406749
45 文章
-
 小凡
34 文章
小凡
34 文章
-
 Daisy萌
32 文章
Daisy萌
32 文章
-
 我的QQ3117863681
24 文章
我的QQ3117863681
24 文章
-
 華志健
23 文章
華志健
23 文章