無人駕駛CAN總線故障排查方案

東西/原料
- CANDTU-400EWGR
- CAN總線闡發儀
- 電腦、Win7操作系統
無人駕駛近況
- 1
無人駕駛顛末十多年的成長,無論是手藝前進仍是政策監管上都有了長足的前進,出格是在Robo-taxi、無人巴士、無人配送、無人環衛等特別場景下的無人駕駛應用,有望在將來幾年慢慢落地。至于乘用車上方面,最先讓通俗消費者體驗到無人駕駛的應用有望是無人代客泊車,這項手藝今朝也已具備必然的貿易化前提,將來1-2年內將在不少本家兒機廠慢慢量產。
 END
END
無人駕駛手藝
- 1
無人駕駛通用手藝本家兒如果云端軟件和硬件傳感器相連系,實現車輛定位、情況感知、路徑規劃決議計劃、車輛節制執行四大焦點手藝。
車輛定位即依托高精地圖,經由過程慣性傳感器和GPS來及時定位車輛。情況感知經由過程激光雷達、毫米波雷達、超聲波雷達等多種車載傳感器來收集數據,再由AI算法軟件來識別汽車所處的情況和狀況。路徑規劃決議計劃即在具有障礙物的情況內按照必然的評價尺度,尋找一條從肇端狀況包羅位置和達到方針狀況的無碰路徑。車輛節制執行需要在情況感知的根本之上,按照決議計劃規劃出的方針軌跡,經由過程縱標的目的和橫標的目的節制系統的共同利用,使汽車可以或許按照方針軌跡精確不變行駛。
 END
END
黑匣子CANDTU利用指南
- 1
CAN 總線故障排查中,最大的難點就是偶發性故障。這讓工程師甚至 CAN 專家都無法精確判定問題的泉源。好比,新能源車輛在行駛 1 萬公里過程中呈現 1次儀表盤“黑了”但后來怎么都無法復現。是以,無人駕駛更需要裝配一臺黑匣子,進行汽車總線數據的及時記實,便利后續的故障闡發排查。
起首進行CANDTU系列產物的設置裝備擺設東西的安裝,選擇對應的安裝包。
- 2
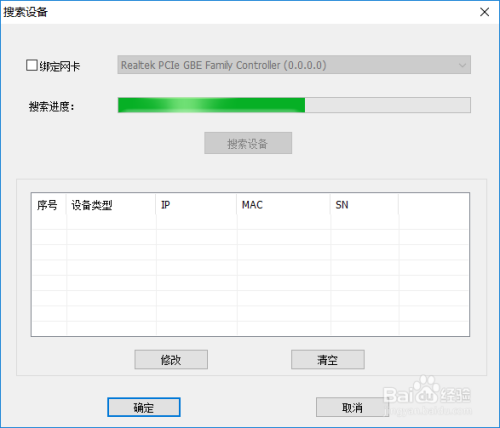
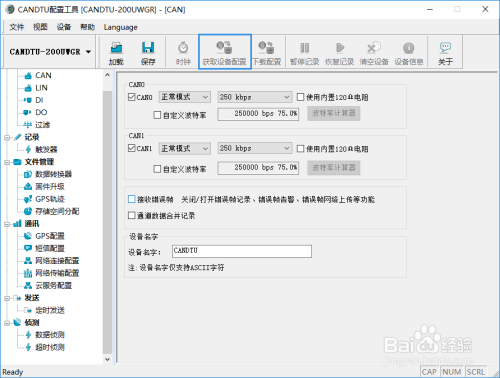
其次,進入設置裝備擺設軟件中進行設備的搜刮設置裝備擺設。
- 3
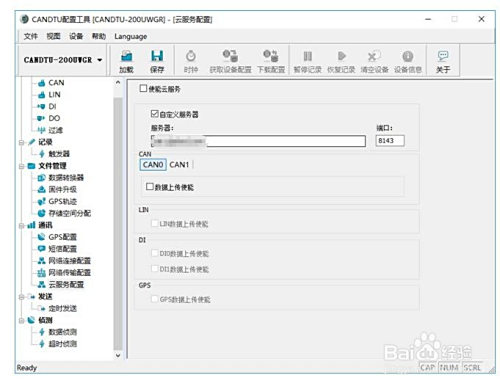
最后進行設備云ID的設置裝備擺設。
 END
END
無人駕駛數據云處置解決方案
- 1
無人駕駛數據云處置方案經由過程CANDTU系列產物的4G通信毗連云端辦事器,CAN報文及時記實,實現長途監控無人駕駛車輛,便利故障診斷。
云端曲線闡發。CANDTU數據云平臺ZWS-CAN聰明云能實現DBC的可視化闡發,連系豐碩多彩的圖形控件,實時進行CAN(FD)數據的可視化展示,直不雅闡發車輛運行環境。

- 2
斗極/GPS定位。CANDTU黑匣子可及時顯示車輛運行速度,對車輛運行軌跡進行記實存儲。連系車輛運行狀況,優化AI算法。
END
常見問題
- 1
CANDTU黑匣子可否撐持無線數據傳輸?
答:CANDTU設備是有無線4G和GPS定位功能的,利用的時辰需要給設備接上對應的天線,4G卡撐持電信移動聯通(用戶自備),設置裝備擺設東西使能數據上傳功能。可搭配云平臺和ZCANPRO上位機軟件利用,或者將數據上傳到本身建立的辦事器。
- 2
為什么電腦能經由過程軟件看到報文,SD卡沒有記實?
答:黑匣子設備“離線記實”和“及時收發”功能同時只能存在一個,因為及時收發的環境下,上位機軟件也可以直接把數據保留起來。只有在REC指示燈閃灼的環境下,設備才會進入記實模式。
END
注重事項
- 設備不克不及經由過程USB線直接讀取SD卡記實文件。SD卡需要掏出來,用SD讀卡器讀取。
- 發表于 2020-05-29 19:00
- 閱讀 ( 892 )
- 分類:其他類型
0 篇文章
作家榜 ?
-
 xiaonan123
189 文章
xiaonan123
189 文章
-
 湯依妹兒
97 文章
湯依妹兒
97 文章
-
 luogf229
46 文章
luogf229
46 文章
-
 jy02406749
45 文章
jy02406749
45 文章
-
 小凡
34 文章
小凡
34 文章
-
 Daisy萌
32 文章
Daisy萌
32 文章
-
 我的QQ3117863681
24 文章
我的QQ3117863681
24 文章
-
 華志健
23 文章
華志健
23 文章