如何將激光掃描插入占用網格
手把手教學。
東西/原料
- matlab
- 電腦
方式/步調
- 1
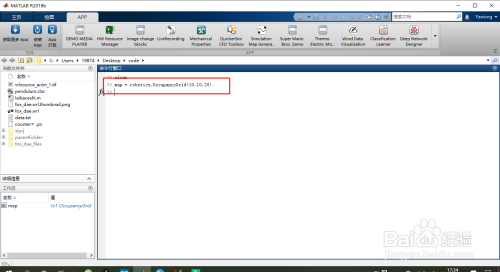
%建立一個空的占用網格地圖。
號令行鍵入:
map = robotics.OccupancyGrid(10,10,20);
- 2
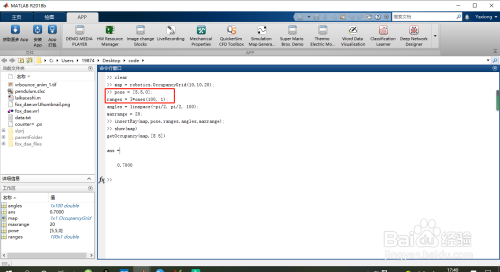
%在占用網格中插入激光掃描。指定機械人的姿態規模和角度以及
號令行鍵入:
pose = [5,5,0];
ranges = 3*ones(100, 1);
- 3
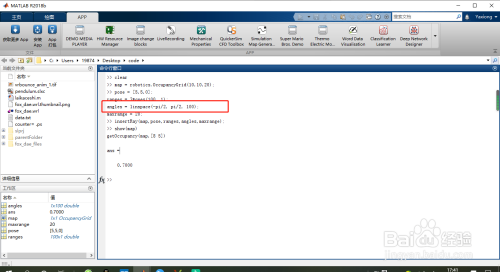
%指定機械人的角度
號令行鍵入:
angles = linspace(-pi/2, pi/2, 100);
- 4
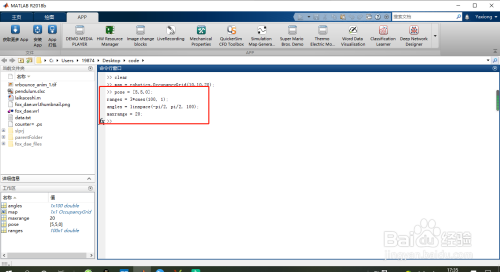
%激光掃描的最大規模。
號令行鍵入:
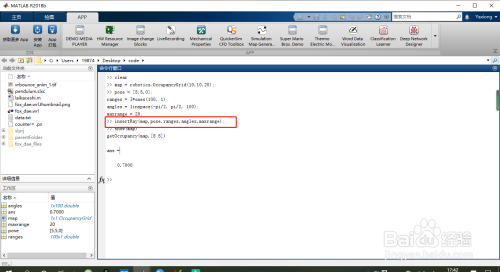
maxrange = 20;
insertRay(map,pose,ranges,angles,maxrange);
- 5
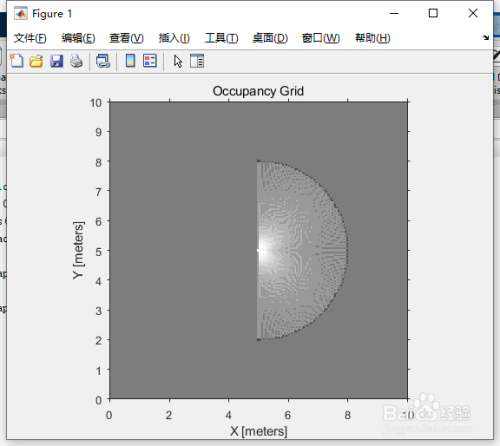
%顯示地圖,以查看插入激光掃描的成果。查抄機械人正前方的鍋的利用環境。
號令行鍵入:
show(map)
getOccupancy(map,[8 5])
- 6
%添加二讀并查看對占用值的更新。
號令行鍵入:
insertRay(map,pose,ranges,angles,maxrange);
- 7
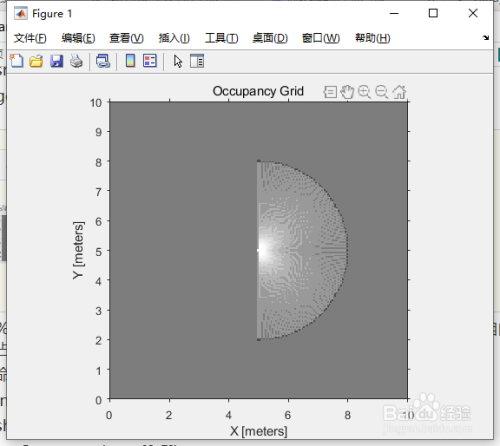
%顯示圖像。
show(map)
getOccupancy(map,[8 5])
 END
END
- 發表于 2020-05-21 22:27
- 閱讀 ( 819 )
- 分類:其他類型
admin
0 篇文章
作家榜 ?
-
 xiaonan123
189 文章
xiaonan123
189 文章
-
 湯依妹兒
97 文章
湯依妹兒
97 文章
-
 luogf229
46 文章
luogf229
46 文章
-
 jy02406749
45 文章
jy02406749
45 文章
-
 小凡
34 文章
小凡
34 文章
-
 Daisy萌
32 文章
Daisy萌
32 文章
-
 我的QQ3117863681
24 文章
我的QQ3117863681
24 文章
-
 華志健
23 文章
華志健
23 文章