如何轉換PGM圖像到地圖
手把手教學。將包含ROS映射的可移植灰度圖(.pgm)文件轉換為在MATLAB中使用的占用網格圖。
東西/原料
- matlab
- 電腦
方式/步調
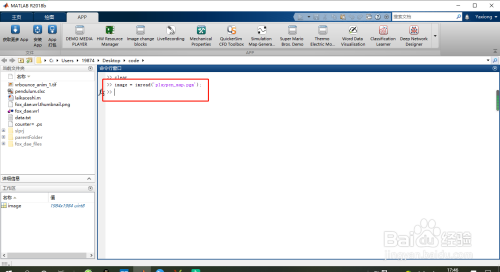
- 1
%利用imread導入圖像。
號令行鍵入:
image = imread('playpen_map.pgm');
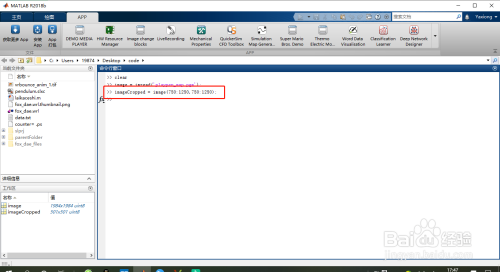
- 2
%裁剪圖像到相關區域。
號令行鍵入:
imageCropped = image(750:1250,750:1250);
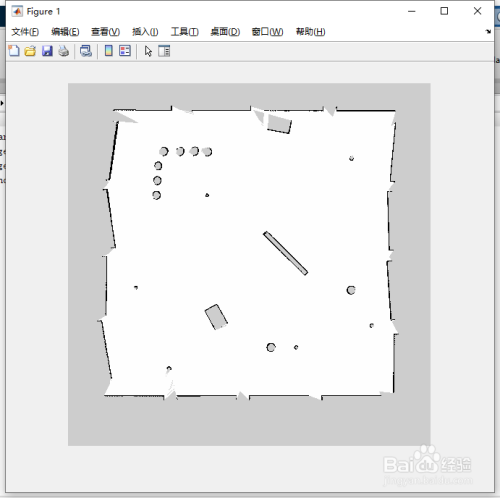
- 3
%顯示圖像。
號令行鍵入:
imshow(imageCropped)
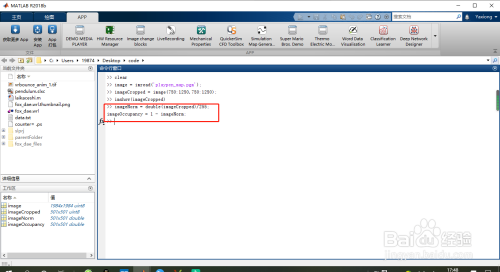
- 4
%PGM值從0到255暗示為uint8。經由過程將裁剪后的圖像轉換為兩倍并將每個單位格除以255來對這些值進行規范化。此圖像顯示了接近0的obstaclesas值。從1減去規范化的圖像,獲得占用值1暗示占用空間。
號令行鍵入:
imageNorm = double(imageCropped)/255;
imageOccupancy = 1 - imageNorm;
- 5
%利用調整后的地圖圖像建立占用網格對象。導入的mapresolution是每米20個單位。
號令行鍵入:
map = robotics.OccupancyGrid(imageOccupancy,20);
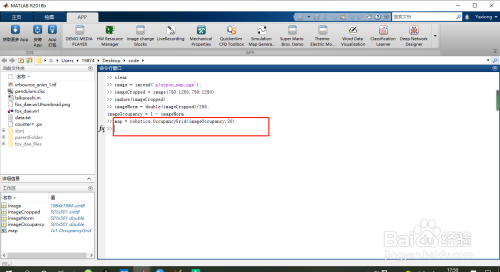
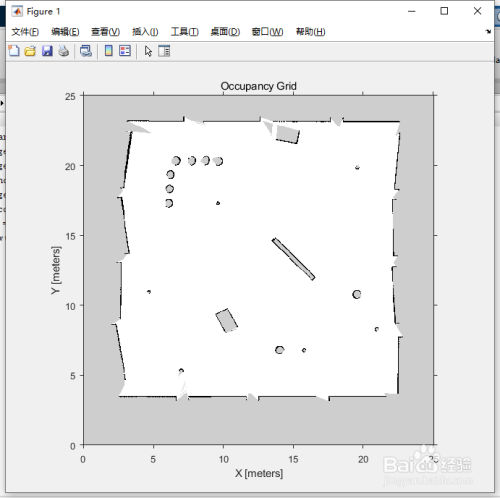
- 6
%顯示圖像。
號令行鍵入:
show(map)
 END
END
- 發表于 2020-05-21 22:28
- 閱讀 ( 1309 )
- 分類:其他類型
admin
0 篇文章
作家榜 ?
-
 xiaonan123
189 文章
xiaonan123
189 文章
-
 湯依妹兒
97 文章
湯依妹兒
97 文章
-
 luogf229
46 文章
luogf229
46 文章
-
 jy02406749
45 文章
jy02406749
45 文章
-
 小凡
34 文章
小凡
34 文章
-
 Daisy萌
32 文章
Daisy萌
32 文章
-
 我的QQ3117863681
24 文章
我的QQ3117863681
24 文章
-
 華志健
23 文章
華志健
23 文章