如何在MATLAB中使用碰撞檢測
手把手教學。
東西/原料
- MATLAB
- 電腦
方式/步調
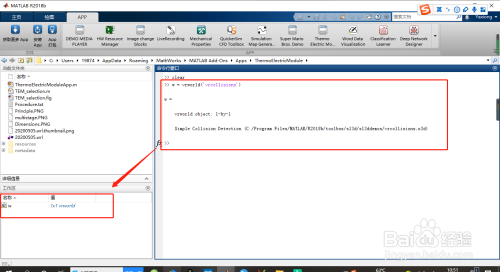
- 1
號令行鍵入:
w = vrworld('vrcollisions');
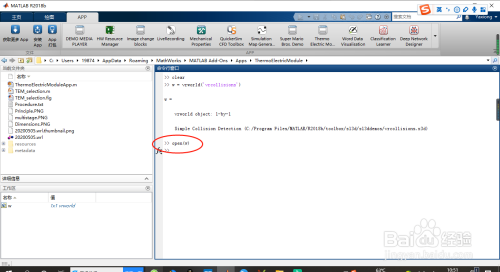
- 2
號令行鍵入:
open(w);
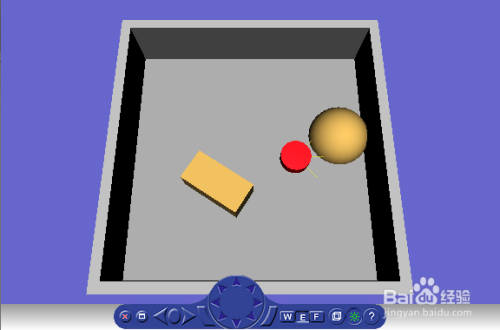
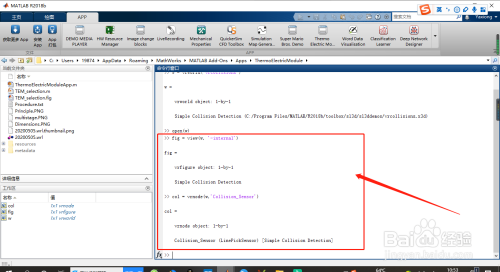
- 3
號令行鍵入:
fig = view(w, '-internal');
- 4
號令行鍵入:
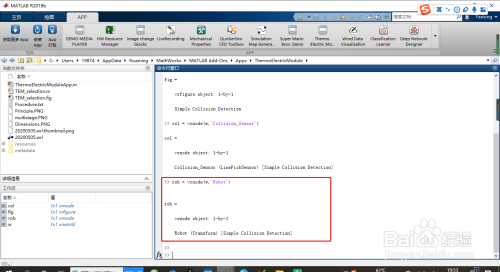
col = vrnode(w,'Collision_Sensor')
- 5
號令行鍵入:
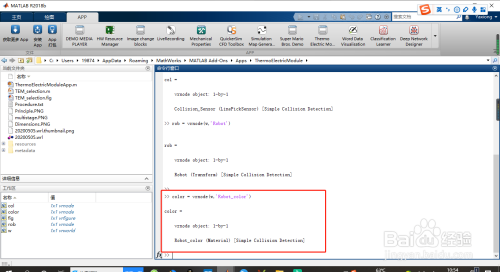
rob = vrnode(w,'Robot')
- 6
號令行鍵入:
color = vrnode(w,'Robot_color')
- 7
號令行鍵入:
col.isActive
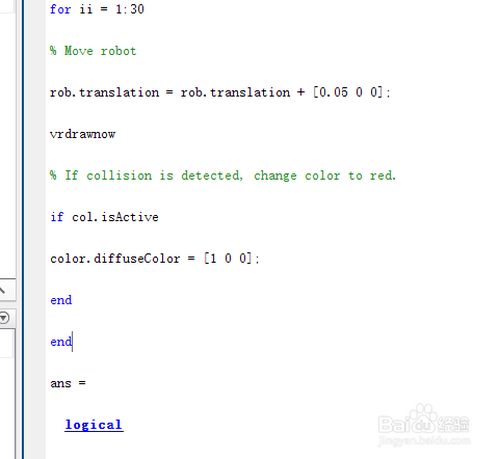
for ii = 1:30
% Move robot
rob.translation = rob.translation + [0.05 0 0];
vrdrawnow
% If collision is detected, change color to red.
if col.isActive
color.diffuseColor = [1 0 0];
end
end
 END
END
- 發表于 2020-05-06 17:01
- 閱讀 ( 1786 )
- 分類:其他類型
admin
0 篇文章
作家榜 ?
-
 xiaonan123
189 文章
xiaonan123
189 文章
-
 湯依妹兒
97 文章
湯依妹兒
97 文章
-
 luogf229
46 文章
luogf229
46 文章
-
 jy02406749
45 文章
jy02406749
45 文章
-
 小凡
34 文章
小凡
34 文章
-
 Daisy萌
32 文章
Daisy萌
32 文章
-
 我的QQ3117863681
24 文章
我的QQ3117863681
24 文章
-
 華志健
23 文章
華志健
23 文章